

Files
Download Full Text (5.3 MB)
Description
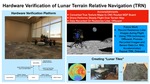
Autonomous delivery to the lunar surface requires proven, cost-effective navigation techniques, especially during the final descent. Terrain Relative Navigation (TRN) is a compelling solution because it has no infrastructure requirements, such as beacons on the lunar surface. However, previous validation of this technique has relied on software simulation of image acquisition and vehicle state estimation. This research leverages the autonomous drone facilities at USU to validate the TRN technique in a hardware system. A hardware demonstration will verify the effectiveness of the TRN technique in a realistic environment simulating the final descent of a lunar lander. This environment will provide realistic data using a scaled model of the lunar surface generated from digital elevation model data. The autonomous drone environment will verify performance by comparing the state estimation onboard the drone with the true state observed by the motion tracking system. Validation of this technique in a hardware application is critical for reliable autonomous navigation to the lunar surface.
Publisher
Utah State University
Funder
URCO
Publication Date
12-10-2020
Disciplines
Electrical and Computer Engineering
Recommended Citation
Christensen, Sam, "Hardware Verification of Lunar Terrain Relative Navigation" (2020). Fall Student Research Symposium 2020. 11.
https://digitalcommons.usu.edu/fsrs2020/11